151st ASA Meeting, Providence, RI
Characterizing Sediment Properties in Shallow Water
Using an Autonomous Underwater
Vehicle Towed Hydrophone Array
Jason D. Holmes - jholmes@bu.edu
William M. Carey
Boston University
110 Cummington St.
Boston, MA 02215
James F. Lynch
Woods Hole Oceanographic Institution
Woods Hole, MA 02543
Popular version of paper 3aUW12
Presented Wednesday Morning, June 7, 2006
151st ASA Meeting, Providence, RI
In shallow water, acoustic propagation is characterized by multiple interactions with the
surface and bottom. In order to understand and predict sonar performance, it is thus
imperative that the physical mechanisms involved in the surface and bottom reflections be
understood. Since the composition of the bottom depends on local geological processes,
the acoustic properties of the bottom, which are typically frequency dependent, are site
specific. Measurements of the local properties of the bottom at different frequencies are
therefore needed to accurately predict shallow water acoustic transmission. Echo-sounder
sonar is one means of measuring bottom properties but they operate at high frequencies,
often above 10 kHz. Other sonar systems, however, operate at lower frequencies, often
2 kHz and below. To characterize the properties at such low frequencies, a different
method was needed.
In the early 1980's, a group of Woods Hole Oceanographic Institution (WHOI) scientists
(Frisk, Lynch and Rajan) found that it was possible to determine local bottom properties
in the low frequency range by performing a long range sound transmission experiment and
using synthetic aperture Hankel transform processing. The Hankel transform is a method
used to determine what direction particular received waves are traveling from, which
indicates how they have reflected from the surface and bottom.
Hydrophones (underwater microphones) were anchored in place on a mooring at sea and a ship
with a sound source emitting different frequencies drifted away from the hydrophones.
As the ship drifted away, interference of multiple reflections from the bottom and surface
caused the recorded sound pressure on the hydrophones to increase and decrease. While the
measurement of acoustic pressure at different ranges could be performed at once with a
long string of hydrophones, it was in fact performed by using a few hydrophones and allowing
the source to hydrophone range to change with time, a process known as "synthetic aperture."
Drift velocities were required in this experiment to ensure the source and receiver position
was accurately recorded. Because of this, it took about 3 hours to travel 1.325 kilometers
away from the hydrophones, during which the tides and currents were changing the properties
of the water.
One of the properties of the Hankel transform, like the Fourier transform, is that improved resolution requires a longer aperture, which in this case that means traveling a longer range. If the measurement is performed at drift velocities, this means it takes a very long time to determine what the bottom properties are. In the summer of 2003, it was hypothesized that this experiment could be done quickly and easily with the use of modern autonomous underwater vehicle (AUV) technology. If an AUV were to be fitted with a hydrophone set of hydrophones, it could be launched by the same ship carrying the source and drive away from the ship to form the acoustic aperture. Improvements in global positioning systems and AUV navigation would allow for accurate determination of the range between the source and the AUV mounted hydrophon. Measurements could be made using the same synthetic aperture Hankel transform technique that was used at WHOI. In addition to the acoustics measurements, however, since the AUV used was designed to make environmental measurements, additional information about the sound speed at the hydrophones, the currents above and below the hydrophones, and other properties could be simultaneously provided by the AUV to make the measurement more accurate. Initial feasibility studies revealed some important factors:
- The radiated and hull born noise in an AUV is exactly in the frequency range of interest, ~2kHz and below.
- Use of an array of hydrophones (multiple hydrophones spaced in a line) could improve the performance of the system by making multiple measurements at the same time along the aperture.
- The power available on an AUV is small compared to that in moored systems.
- Moving at higher speeds required designing a system that was not susceptible to flow noise and was able to move in a stable fashion, i.e. it would not "flap around."
The first two observations meant that a towed hydrophone array was probably the best solution. While vehicle noise can be subdued to some extent, the easiest way to minimize it is to move the hydrophones away from the vehicle. Also, the best improvement in the signal processing would come from an array of hydrophones that was on the order of wavelengths long, which at low frequencies is several meters. Since AUVs themselves are at most a few meters long, the array would have to be longer than the vehicle. Strapping such a long sensor to the side or front of the vehicle would not be hydro-dynamically ideal, and violates the earlier requirement for a system separated from the vehicle due to noise. Thus, the idea of towing a flexible hydrophone array behind the AUV was born.
Power and noise concerns were mitigated by careful design of a towed array system. Using a fluid filled hose to encase the hydrophones provided a neutrally buoyant system and minimized the flow noise much like a foam cover does for a hand held microphone on a windy day. Attaching a drogue, which is a device intended to add drag (in this case a rope), to the end of the array increased the drag slightly and kept the system stable. Implementation of the system was accomplished without using any vehicle power by incorporating an externally mounted recording canister with its own battery power. Off the shelf mini-discs were used to record the signals from 6 hydrophones in the array, which could then be downloaded, to a computer after the mission with a universal serial bus (USB) cable.
In September and December of 2005, two synthetic aperture Hankel transform experiments were conducted in Nantucket Sound in proximity to the site used by Frisk, Lynch and Rajan to test how well the new AUV system would perform. A pre-experiment site survey provided many of the ground truth properties of the sediment in the area and ship board and AUV mounted sensors provided an extensive set of data characterizing the water column at the time of the experiments. The first experiment, in September, achieved a 2 km range from the moored ship in less than 1 hour with tones consisting of 635, 823, 1031, and 1228 Hz emitted from the source. In the second experiment, the range was extended to 4 km and back (a total of 8 km) with 220.5, 415, and 635 Hz tones emitted on the outbound leg and 635, 823, 1031, and 1228 Hz emitted on the inbound leg.
The transmission results obtained in these experiments agreed very well with transmission results calculated using numerical computer codes and the data from the pre-experiment survey. Further, the signal enhancement measured was nearly the enhancement expected from an array being towed perfectly straight, indicating that a straight, stable tow was achieved. Finally, the acoustic properties of the bottom determined using the system agreed extremely well with historical data given the properties measured during the site survey, indicating that the system could accurately measure the bottom properties.
The demonstration of this new measurement capability indicates that small, autonomous measurement systems could be the future of low frequency, shallow water acoustic measurements. Two people can deploy the system from a single ship without the use of moored assets and expect accurate data covering many kilometers to be returned to them in a matter of a few hours. Such cost effective, accurate, and efficient systems that could measure site-specific properties were almost unimaginable 15 years ago. While not discussed here, this AUV towed array system is also capable of tracking local shipping traffic without being noticed. This readily lends itself to be applied to coastal defense, port security, and national security.
Figures
Figure 1 shows a schematic of the Frisk-Lynch-Rajan experiment as taken from reference [1]. Figure 2 shows the schematic for the same system using an AUV towed array system. Figure 3 is a photograph of the recording system as attached to the vehicle with an up close view of the off the shelf recorders. Figure 4 is the measured transmission loss (red dot) as function of range in meters compared to the calculated transmission loss (blue line) at 415 Hz. The differences at ranges beyond 1 km are due to the fact that the model is range independent while the actual bottom has some range dependence.
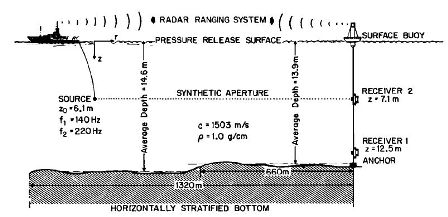
Figure 1
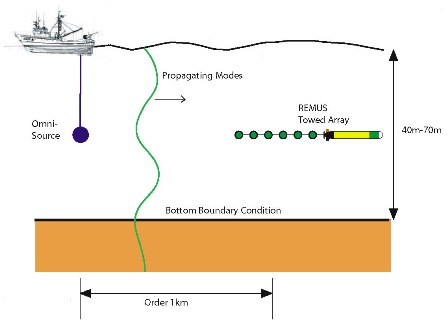
Figure 2

Figure 3
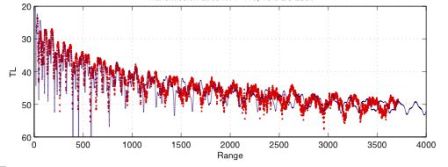
Figure 4
References
[1] G. V. Frisk, J. F. Lynch, and S. D. Rajan, "Determination of compressional wave
speed profiles using modal inverse techniques in a range-dependent environment
in Nantucket Sound," The Journal of the Acoustical Society of America 86(5),
19281939 (1989).
[ Lay Language Paper Index | Press Room ]
|