Depth-profiling Ambient Noise in the Deepest Oceans
David R. Barclay - dbarclay@mpl.ucsd.edu
Fernando
Simonet - nando@mpl.ucsd.edu
Michael J.
Buckingham - mbuckingham@ucsd.edu
Marine Physical Laboratory,
Scripps Institution of Oceanography
University of California, San
Diego
9500 Gilman Drive, La Jolla, CA
92093-0238, USA
Popular version of paper 1pUW4
Presented Monday afternoon, April
19, 2010
159th ASA meeting, Baltimore, MD
In 1951, during a survey of the
Mariana Trench near Guam, the British Royal Navy ship HMS Challenger identified the deepest known point in the ocean,
recording a depth of 10,911 meters (35,797 feet) at a position near 11˚
22 N 142˚ 36 E. Known as the Challenger Deep, the sea bed at this
location is as far beneath the sea surface as commercial jet aircraft fly above
it. Few descents to the bottom of the Challenger Deep have been attempted, and
only one manned submersible has ever reached the greatest depth, the bathyscaph
Trieste on 23 January 1960 with
Jacques Picard and US Navy Lieutenant (as he was then) Don Walsh on board.
Some fifty years on, it remains a
fact that almost nothing is known about the greatest ocean depths, not least
because of the enormous pressure that any exploratory vehicle must withstand in
order to survive the deepest dives: every 10 meters down is equivalent to an
increase in pressure of one atmosphere, which equates to approximately 1,100
atmospheres at the bottom of the Challenger Deep. By comparison, a space craft
operates in a benign environment, having to contend with a pressure of just one
atmosphere!
The ocean is an acoustically
noisy environment, with sound created by wind-driven waves on the sea surface,
by various seismic events including earthquakes and volcanoes, by marine
mammals and other sea creatures, and by anthropogenic activities associated
with shipping, along with offshore surveying and drilling for hydrocarbons.
Although the characteristics of near-surface ambient noise have been fairly
thoroughly investigated, comparatively little is known about the nature of the
ambient sound field at greater depths, and especially at depths below 6,000
meters. To probe these extreme regions, we have developed Deep Sound, an untethered
instrument platform with the capability of descending to (and returning from)
the bottom of the oceans deepest trenches.

Figure
1. An early
version of Deep Sound, photographed during a tethered engineering test.
Deep Sound, illustrated in Fig.1,
is designed to free-fall from the sea surface to a pre-assigned depth, at which
point a burn wire releases a drop weight, allowing the system to return to the
surface under buoyancy. The descent and ascent rates are the same at 0.6 m/s,
corresponding to a round-trip travel time to the bottom of the Challenger Deep
of just over 10 hours. A critically important component of Deep Sound is a
Vitrovex glass sphere, comprised of two hemispheres, with an external diameter
of 43.2 cm. The sphere houses a pack of lithium-ion batteries, of the type
found in modern lap-top computers, and a suite of microprocessor-controlled
electronics for data acquisition, data storage, power management and system
control. Outside the sphere, several hydrophones (underwater microphones) are
arranged in vertical and horizontal configurations, and a
conductivity-temperature-depth (CTD) probe returns environmental data from
which the speed of sound as a function of depth is computed. Motion sensors
continuously monitor the pitch, roll and yaw of the system, allowing advection
due to local current flow to be monitored.
All the data acquired during a
deployment of Deep Sound are stored on-board in solid-state memory. It is
therefore imperative that the drop weight releases, enabling the system to
return safely to the surface with the data. A sequence of fail-safe mechanisms
has been integrated into the system, designed to ensure that the burn wire is
indeed triggered even though the pre-assigned depth may not have been
reached. Recovery of the system is
facilitated by three antennas: a radio beacon, an Argos (GPS) beacon and a
xenon high-intensity strobe light. Once Deep Sound is back on board ship, the
data are downloaded via a wireless link or through hard-wire connectors
penetrating the sphere. Other penetrators allow the batteries to be recharged
without separating the hemispheres.
Each of the hydrophones has a
bandwidth of 30 kHz and is calibrated over a substantial depth range. The
motion of the hydrophones through the water induces a local turbulent flow
field, which in turn creates low-frequency (below a few hundred Hertz)
interference in the acoustic recordings. To reduce the effects of this flow
noise, each hydrophone is fitted with an open-pore-foam flow shield, which in
effect keeps the turbulent pressure fluctuations away from the active surface
of the sensor.
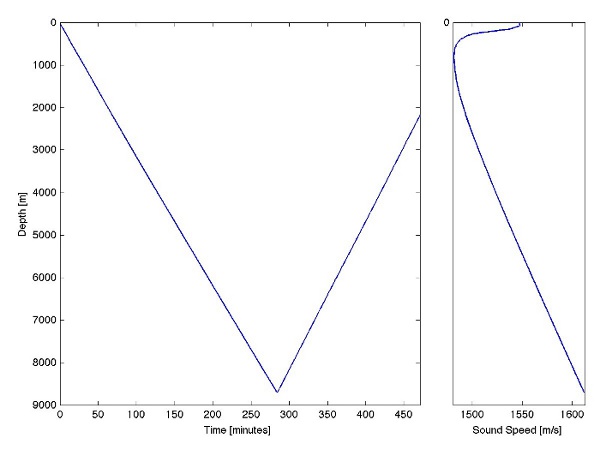
Figure
2. Depth versus
time profile for one of the Deep Sound deployments in the Mariana Trench.
In May 2009, Deep Sound was
deployed on three occasions in the Philippine Sea, to depths of 5,100, 5,500
and 6,000 meters. Two further deployments were made in November 2009, in the
Mariana Trench, both to a depth of 9,000 meters. The system was successfully
recovered after all these deployments and complete data sets were downloaded
from the onboard memory. Fig. 2 shows an example from the Mariana Trench of a
depth-versus-time profile, along with the sound speed profiles that were
measured during the descent and ascent; and an ambient noise spectrum taken at
a depth of 8,413 meters at the same location is shown in Fig. 3. This noise
spectrum is notable for its smoothness over much of the spectral range, which
is testimony to the effectiveness of the flow shield on the hydrophone. By
combining the outputs from two vertically aligned hydrophones, it is possible
to obtain the vertical coherence of the noise, which provides a measure of the
directionality of the noise in the vertical. Such information helps in
understanding the effect of the sound speed profile on the spatial and temporal
properties of the ambient noise field.
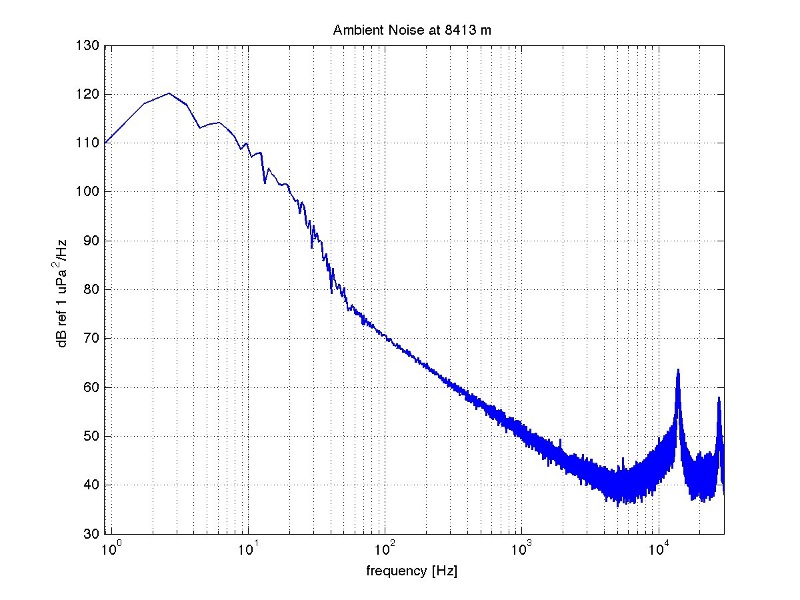
Figure
3. Ambient noise
spectrum from a depth of 8,413 m in the Mariana Trench.
The ultimate challenge for Deep
Sound is, of course, the Challenger Deep at the southern end of the Mariana
Trench. To meet the demands of descending to such a great depth, a new version
of Deep Sound is currently being developed with an enhanced depth rating and an
extended sensor suite, but still retaining a Vitrovex sphere as the pressure
vessel housing the electronics. In the late summer of 2010, we plan to deploy
the new system to a depth of almost 11,000 meters, to the bottom of the
Challenger Deep. If successful, it will return with continuous acoustic and
environmental recordings taken from the surface to the bottom of the deepest
known part of the Earths oceans. (Research supported by the Office of Naval
Research)