F. Gerlotto* - fgerlotto@ifop.cl
P. Fernandes, E.J. Simmonds, S. Georgakarakos, P. Brehmer, D. Reid, P. Copland and J. Paramo
*IRD, Roman Diaz 264
Providencia, Santiago, Chile
Popular version of paper 1aAO1
Presented Monday morning, November 10, 2003
146th ASA Meeting, Austin, TX
Underwater Observation
The marine environment, and especially the species which inhabit it, are becoming increasingly subjected to human influence, often to their detriment. Monitoring the status of fish stocks and other marine resources is vital if they are to be managed sustainably. Methods of accurately detecting and quantifying the distribution and abundance of marine life are, therefore, paramount.
Acoustic instruments, such as echosounders and sonar, are unique as underwater sampling tools in that they can detect objects at ranges of many hundreds of metres, independent of water clarity and depth. However, until recently, these instruments could only operate in two dimensions, providing observational "slices" through the water column. We used a multibeam sonar which provides detailed data describing the internal and external 3-dimensional structure of underwater objects such as fish schools. In addition to elucidating large scale features, such instruments may in future be used to provide information on the behavioural ecology and status of the population.
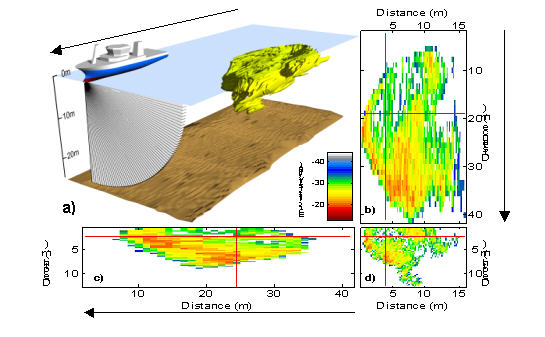
Figure 1. Images of a fish school of Sardinella aurita from a multibeam sonar. Arrows indicate vessel route. a) 3D reconstruction of the school (volume 2260 m3, surface area 5796 m2, overall length 41.6 m, width 16.7 m, height 14.9 m). Multibeam sonar receiving beams are shown at the front of the vessel. Remaining panels show cross-sections of density in fish from: b) horizontal plane; c) vertical plane alongships; d) vertical plane athwartships. Red cross-hairs indicate location of the other two cross-sections.
Multibeam Sonars
Conventionally, multibeam sonars are used to measure depth across a strip or swathe of the seafloor for mapping purposes. We adapted an instrument to sample echoes from the whole water column. Each beam was divided into successive individual samples in much the same way as a scientific echosounder (Figure 1a).
The instrument used was a RESON SeaBat 6012 90 multibeam sonar (60 x 1.5 beams) and was directed perpendicular to the route of the vessel at an elevation angle of 45 (Figure 1a) . Each transmission provided a high resolution (5 cm) rectangular digitised image (animation 1). Three dimensional volume segmentation techniques used in medical imaging were applied to extract fish schools and measure their properties (morphometrics, such as school length, width and volume).
Applications in Fisheries Research
The instrument was used in a wide variety of fisheries research applications:
Three dimensional descriptions of school structure and position in the water column. Knowledge of schooling is vital for understanding many aspects of fish (and fisheries) ecology. Detailed internal images of fish schools provided insights into the organisation of fish within a school, indicating the presence of large gaps or vacuoles and areas of higher densities or nuclei (e.g. Figure 1 b,c,d and animation 1.
CLICK PICTURE FOR MOVIE
Animation 1. Video clip in 3D showing a complex assemblage
of herring schools (Scotland)
Bottom depth: 20 m. length of the sampled 3D volume: 150 m; width: 50 m.
Quantification of school avoidance in acoustic surveys. Many vessels have been shown to induce an avoidance reaction among fish because of the noise they make. The multibeam sonar was able to detect fish at distance perpendicular to the direction of the vessel and, therefore, detect fish moving out of the path of the vessel (Figure 2).
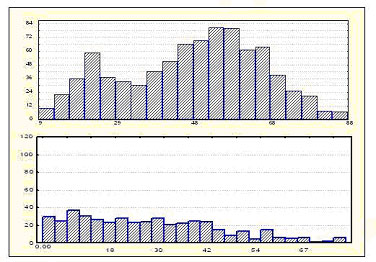
Figure 2. Number of schools at different distances (0 to 100 m) from a survey vessel, showing a strong avoidance (upper histogram: Senegal, Sardinella) and no avoidance (lower histogram: Chile, anchovy). Avoidance can be measured by the significantly lower number of schools below the vessel (distance 0 m) compared to the higher number at large distances for sardinella, while there is no difference in school number at short and large distance from the vessel in the case of anchovy (x: distance from the vessel; y: number of school by distance class).
The observation and quantification of fish in relation to survey gear, such as trawls. Previously, such work was restricted to visual observations using video cameras, which only have a limited range (<5m) in normal conditions. This is usually not sufficient to view much the trawl, for example the opening of the net, which can be up to 15m in extent. Multibeam sonar allows observations at greater range and hence over wider areas, e.g. between the wings of the net or even between the doors. At the standard operating ranges and resolutions (10-15m and 5cm) it is possible to observe and count individual fish entering or escaping from the net. These observations can then be used to improve the quality of trawl survey data.
Predation on mussels in aquaculture grounds by fish schools. Constructions in aquaculture, such as fish cages or mussel longlines, make it difficult to use traditional acoustic methods because of the inability to discriminate between the structure and biological echoes. In the latter example, mussels on a longline were being eaten by sea breams, and the 3D structure of both the longline and fish schools was extracted. Moreover, the quantity of mussels on the longline could be monitored (animation 2).
CLICK PICTURE FOR MOVIE
Animation 2. 3D echogram on raw data describing a 250 m long mussel longline, off Sète (French Mediterranean: bottom depth 30 m). Acoustic background noise and interferences with other acoustic devices produces circular lines above and below the bottom. The detection shows the rope, the rigging, buoys, mussel on vertical cords, and a small fish school.
Fish school distribution in relation to ecological factors, even in very shallow waters. Deploying horizontally fixed multibeam sonars in channels of less than 1.5 m depth allowed for the observation of fish migration between the sea and inshore lagoons which was related to season and hydrological conditions.
Future Work
A series of case studies have shown that a multibeam sonar system is able to make useful observations in 3-dimensions. In order to advance the system capabilities a series of improvements are needed. Although the individual beams have been calibrated, the absolute densities of fish require particular measurements, especially on echo characteristics when a fish is insonified at different angles. Once densities of fish are determined, the system can be used to quantify the abundance and distribution of fish on small or large scales, for studies of behaviour or more accurate assessments of population numbers.
A wider field of observation would increase the sample volume: 180 units would be ideal for surface based survey platforms such as ships. 360 units would be better for underwater platforms such as autonomous underwater vehicles, giving total volume coverage. Such instruments are in development and will be ideal for observations of fish behaviour.
The management and processing of data is still in its infancy. Specific software has been adapted from the field of medical imaging, but further work is needed to exploit the full capabilities of the system. The vast quantity of data that can be delivered requires sophisticated image analysis routines to assist operators in detecting a multitude of objects in the immense sampling space. However, these problems diminish as computing power and capacity increases. Full 3-D volumetric imaging of the ocean is a rising reality.