[ Lay Language Paper Index | Press Room ]
Roger Gauss – roger.gauss@nrl.navy.mil
Acoustics Division
Naval Research Laboratory
Washington, DC 20375
John Preston – preston@ciao.arl.psu.edu
Applied Research Laboratory
The Pennsylvania State University
State College, PA 16804
Popular version of paper 4pUW6, “The effect of different environments on shallow-water reverberation: Measurements and modeling”
Presented 2:15 p.m. Friday afternoon, November 30, 2007
154th ASA Meeting, New Orleans, LA
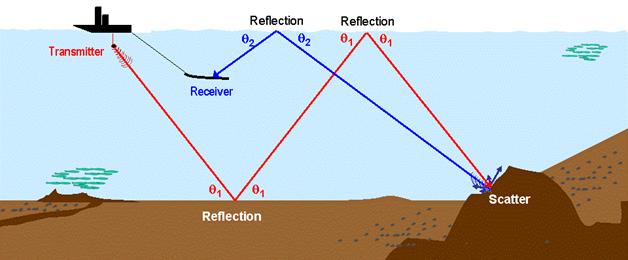
We have all listened to our calls echo from canyon walls. How do sounds reverberate under the sea? The answer is a striking and complex dependence on a number of factors. As a result, the performance of active sonar systems operating in shallow-water environments can vary dramatically, depending on the local oceanography, geology, and biology, as well as on the sonar geometry and characteristics (such as frequency and directivity). Hence, it is critical to be able to understand and accurately predict this complex acoustic process. The simplified schematic below (not to scale) illustrates the reverberation process, which includes the effects of propagation of sound from the sonar’s transmitter to an environmental feature, scattering of the acoustic energy from that feature, and propagation of the scattered echoes to the sonar’s receiver.
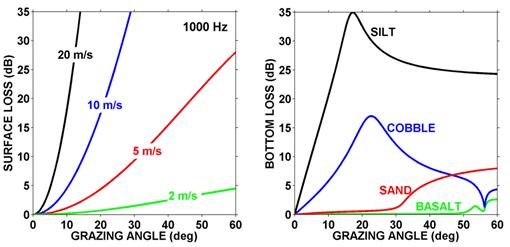
Propagation is sensitive to the waveguide’s sound-speed structure, which controls the angles of ensonification (grazing angles) with the ocean boundaries and environmental scatterers. In shallow water, the propagation typically includes many interactions with the penetrable seafloor and impenetrable moving sea surface, reducing and spreading the acoustic energy with each bounce. As seen in the example below, depending on the sea-surface conditions (sea state, related to the wind speed) and bottom properties (bottom type shown), these single-bounce reflection losses can be quite substantial. (These plots assume average sea-surface conditions for surface loss, and average geophysical values for each generic bottom type for bottom loss; in reality, there is a distribution of observable values about each curve.)
Multiple boundary interactions imply energy can be quickly lost into the absorbent bottom, so that it is primarily low-angle energy that survives at long ranges. Hence, scatterers in the water column (undersea ridges, seamounts, fish, and bubble clouds due to breaking waves) and in the upper-sediment (such as the roughness of the water-sediment interface) will typically influence long-range reverberation the most.
The wide range of shallow-water environments encountered throughout the world presents unique challenges to sonar operators and to the reverberation modeler. Variability exists at many scales, with significant differences not only from site to site, but a given site:
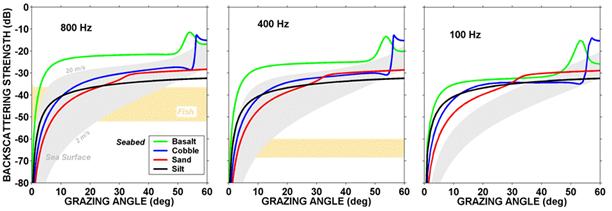
Pictured below are the relative backscattering strengths of the seabed (vs. bottom type), sea surface (for a range of wind speeds, in gray), and a uniform layer of one species of fish (for a range of sizes, in tan), all shown as a function of grazing angle at three frequencies. Seafloor scattering depends strongly on grazing angle and bottom properties, but less so on acoustic frequency. (As with bottom loss, the line plots assume typical geophysical values for each bottom type; in reality, there is a band of observable values about each curve.) Sea-surface scattering has a notable dependence on frequency, grazing angle and wind speed. The fish chosen for this example are redfish, with the spread in level due to an assumed range of sizes (0.3 to 0.4 m) [for a fixed density (0.00003 per m3) and set of depths (200-500 m)]. The very strong dependence of fish scattering on frequency is evident, as is the weak dependence on scattering angle. This implies that when the acoustic frequency is near the resonant frequency of their swimbladders, and when present in sufficient numbers, fish can dominate the low-angle acoustic response. (In general, the range of fish backscattering levels observable at a given frequency can vary greatly, as it depends on a number of factors, primarily what species are present, and their sizes, densities and depths.)
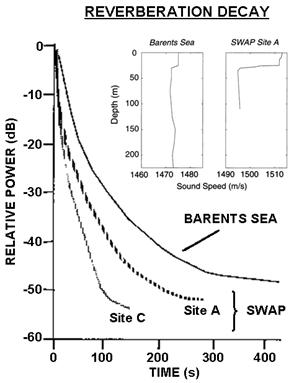
The authors have participated in a number of shallow-water measurements over the past 15+ years with the goal of characterizing reverberation and its dependence on environmental and system factors. While separable to some degree in deep-water environments, bottom, surface and fish scattering are not so cleanly separable in shallow-water environments. The dominant scattering or propagation mechanisms must often be inferred by repeated broadband measurements, coupled with comparisons to physics-based model predictions. Each shallow-water environment can be unique; techniques that work in one environment do not necessarily extrapolate to another (stressing the need for in-situ measurements). An example of site dependence is shown below which depicts representative reverberation-decay differences at 400 Hz between the southern Barents Sea and the southwest approaches (SWAP) to England. The differences showcase the importance and interplay of both the boundary conditions and propagation structure on the acoustics. This area of the Barents Sea had a thin patchy sediment layer overlying a hard (basaltic) basement, while the SWAP areas were also thinly sedimented but had more absorbent acoustic basements, with Site A’s described as a mix of chalk, clay, limestone, and sand, and Site C’s as fast chalk (which has an appreciable shear velocity that increases absorption). Other factors for the differences in reverberation decays between the Barents Sea and SWAP were the relative water depths and the sound-speed structure (inset in below figure): the shallower waters and more downward-refracting sound-speed profiles of the SWAP areas contributed to their faster absorption of acoustic energy with range.
By deconvolving the system aspects, a knowledge base can be developed that is applicable to a wide range of active sonars. From such a base, physics-based methods and algorithms can be designed to optimize sonar performance for a given environment or operational scenario. While the environment presents many challenges to sonar systems because of its spatiotemporal variability and the strong coupling between scattering and propagation structures, it should also be viewed as both potentially manageable and presenting opportunities. If the mechanisms are understood, they can be dealt with and even exploited (e.g., changing the operating frequency or signal processing in response to the local environmental conditions).