


Accurate measurement of distance and velocity using ultrasonic waves
Shinnosuke Hirata - hirata.s.ab@m.titech.ac.jp
Department of Information Processing
Interdisciplinary Graduate School of Science and Engineering
Tokyo Institute of Technology
G2-32, 4259 Nagatsuta-cho, Midori-ku, Yokohama 226-8502, Japan
Minoru Kuribayashi Kurosawa
(Tokyo Institute of Technology, Japan)
Takashi Katagiri
(Sutekina Inc., Japan)
Popular version of paper 1pSPb6
Presented Monday Afternoon, June 30, 2008
Acoustics '08 Paris, Palais des Congrès, Paris, France
Bats use echolocation for environment recognition. That is, they use reflected sound waves to measure the distance, the velocity, and the scale of insects or trees. Echolocation includes broadcasting ultrasonic waves and then perceiving echoes reflected from the surface of the objects. T echnological application of echolocation using ultrasonic sensors has been studied and used for environment recognition in autonomous mobile robots, because of two advantages: the advantage of ultrasonic waves which can easily reflect from structures, and the advantage of ultrasonic sensors which are cheap, small, and simple.
The method of distance measurement using ultrasonic waves is based on the pulse-echo method, which determines the distance of an object by measurement of time-of-flight (TOF), as illustrated in Figure 1. The TOF is the interval from transmission of an ultrasonic pulse to reception of an echo re flected from the object. The distance is calculated from the product of the TOF and the acoustic velocity.
.
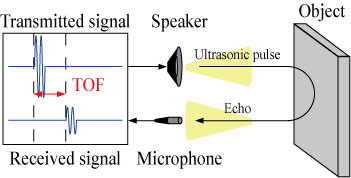
Fig 1: Distance measurement by the pulse-echo method.
The method of velocity measurement using ultrasonic waves is based on the pulse-Doppler method. When the object is moving, due to the Doppler effect introduced by the motion of the object, the reflected echo is Doppler-shifted. The frequency of Doppler-shifted echo is increased or decreased in proportion to the velocity of the object. Therefore, the pulse-Doppler method determines the velocity of the object by measurement of increase or decrease in the frequency, as illustrated in Figure 2 .
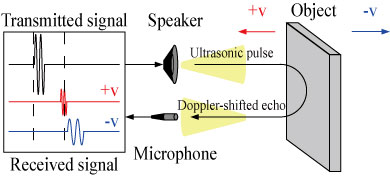
Fig 2: Velocity measurement by the pulse-Doppler method.
Furthermore, the TOF of the Doppler-shifted echo in Figure 2 is different from the TOF of the echo in Figure 1. The TOF is also Doppler-shifted in proportion to the velocity of the object. Velocity measurement with high resolution and calibration of the Doppler-shifted TOF is required to measure an accurate distance to the object. However, frequency analysis by the Fourier transform cannot measure the velocity with high resolution (e.g. velocity resolution: 0.85 m/s at the window of the Fourier transform : 10 ms).
In the proposed method of distance and velocity measurement, two LPM (Linear-period modulated) ultrasonic waves are continuously transmitted. The period of the LPM signal linearly increases with time as illustrated in Figure 3 . The received signal, which includes the reflected echo, is correlated with the LPM signal, which is a cross-correlation operation, as illustrated in Figure 4 . Cross-correlation operation is the method for effective improvement of the resolution of the TOF. The cross-correlation function of the reflected echo, two continuous LPM signals, and the LPM signal has two peaks. The first peak of the cross-correlation function shows the Doppler-shifted TOF, and the interval of the first peak and the second peak shows the length of the LPM signal . The length is also Doppler-shifted in proportion to the velocity of the object. Therefore, the velocity can be calculated from the Doppler-shifted length. The proposed method can measure the distance and the velocity of the object with high resolution because of high sampling frequency of signal processing (e.g., velocity resolution: 0.005 m/s at sampling frequency: 12.5 MHz).
Fig 3: The linear-period modulated signal.
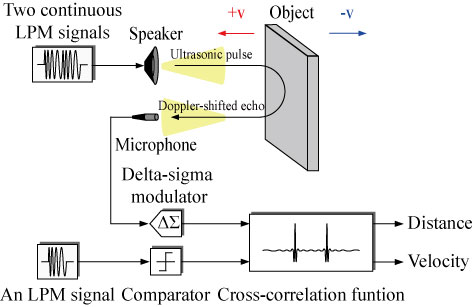
Fig 4: Design of the proposed method of distance and velocity measurement by transmitting two continuous LPM signals.
The measured velocities and their errors, which are examined by computer simulation, are illustrated in Figure 5. The velocity of the object can be measured with high resolution by the proposed method. By calibrating the Doppler-shifted TOF with the measured velocity , the distance of the moving object can be accurately measured .
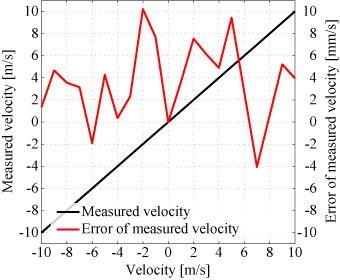
Fig 5: The velocities and their errors measured by the proposed method.