Oleg A. Godin - oleg.godin@noaa.gov
Nikolay A. Zabotin - nikolay.zabotin@gmail.com
CIRES, University of Colorado and NOAA/Earth System Research Laboratory
Mail Code R/PSD99
325 Broadway
Boulder, CO 80305-3328, USA
Valery V. Goncharov - vvg12@yandex.ru
P. P. Shirshov Oceanology Institute of the Russian Academy of Sciences
36 Nakhimovski Ave.
Moscow 117997, Russia
Popular version of paper 2aAOa4
Presented Tuesday morning, October 27, 2009
158th ASA Meeting, San Antonio, TX
This paper presents the first experimental demonstration of acoustic tomography in a deep ocean that uses ambient noise -- rather than dedicated sound sources -- to probe the ocean. Because of its low capital costs, ability to provide long time series of data, and a negligible impact on the environment and marine mammals, acoustic tomography with ambient noise may find applications in various ocean observing systems in which traditional tomography, which relies on powerful man-made sound sources, is deemed too expensive or too invasive.
Underwater acoustic techniques are usually either passive or active. With a passive technique, one uses underwater microphones, called hydrophones, to listen to sounds produced by an object of interest, such as a vocalizing whale or a submarine. With an active technique, one uses sound sources to radiate probing signals and records the resulting acoustic field by hydrophones. Properties of targets or the propagation environment are retrieved by comparing the radiated and received signals. In particular, one can determine sound speed and water temperature from measurements of the acoustic travel time, that is, the time delay between radiated and received signals.
In this paper we report how a biologically-inspired approach to acoustic remote sensing that draws on the ways animals use their senses can be used to complement or replace traditional passive and active techniques.
In their everyday lives, humans and other mammals get the bulk of their visual information from processing diffuse electromagnetic wave fields." Ambient light that is blocked, reflected or refracted by objects provides information about shape, position, optical density, etc. In dealing with sounds, mammals compare signals reaching their ears to efficiently evaluate location of the sound source.
Oceans are rather noisy environments. That's because, unlike light and other electromagnetic waves, sound can propagate large distances underwater with very little attenuation. In the oceans, acoustics waves are generated by physical processes on the surface such as wave break, by biological activity, by local and distant shipping, and by other sources.
This ambient noise is normally considered a hindrance, a limiting factor for traditional acoustic techniques. Our approach utilizes the ambient noise as acoustic daylight to get information about the ocean, much like our eyes use daylight to learn about our surroundings.
One way to retrieve useful information from ambient noise is to compare (correlate) noise arriving at two spatially separated hydrophones -- a process similar to how the brain subconsciously compares information from the two ears to determine the location of a sound. Theoretically, the correlation function of a perfectly diffuse noise field recorded in this way at two points contains all the information about a stationary environment that can be obtained by placing transceivers (that is, combinations of a sound source and a receiver) at the two points. Thus, using acoustic daylight one should be able to learn just as much as with active acoustic techniques about the environment.
Still, a number of important open questions remain about whether this approach is realizable. The noise correlation technique requires that the noise arrives more or less evenly from every direction, that it be recorded and averaged over a long time, and that the physical parameters of the environment not change appreciably during this process. Is ambient noise in the ocean actually sufficiently diffuse? Are the necessary averaging times are reasonable for acoustic remote sensing with acoustic daylight to be possible or practical?
To address these questions, we re-examined ambient noise data obtained during the 19981999 Billboard Array Experiment. This experiment was a part of the North Pacific Acoustic Laboratory (NPAL) program designed to investigate long-range sound propagation. The data was obtained and have been made available for this study by the NPAL Group (J. A. Colosi, B. D. Cornuelle, B. D. Dushaw, M. A. Dzieciuch, B. M. Howe, J. A. Mercer, W. H. Munk, R. C. Spindel, and P. F. Worcester). The Billboard Array consisted of 120 hydrophones distributed among five vertical arrays deployed at Sur Ridge off Point Sur, California in 1800 m-deep water (figure 1).
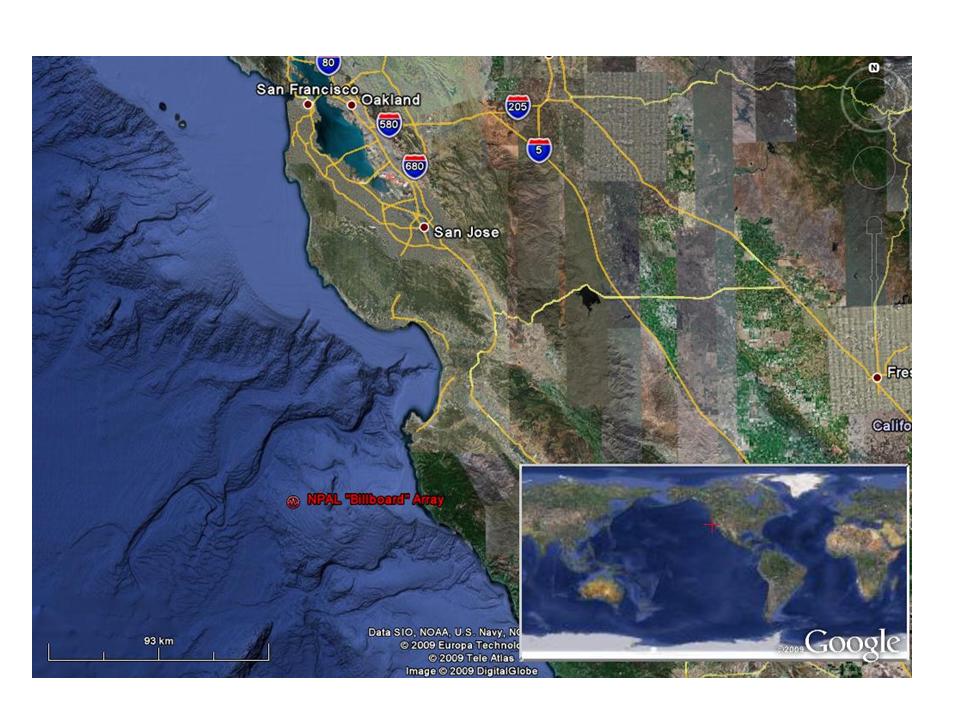
Figure 1. Location of the NPAL Billboard Array.
We evaluated noise cross-correlation function by averaging time series of noise recorded on various pairs of hydrophones in the Billboard Array. For any two hydrophones, the cross-correlation function has been found to have a number of robust peaks. Figure 2 shows noise cross-correlation for time delay ranging from 0 to 1 sec between a hydrophone at about 600 m depth and 20 hydrophones at depth from 400 m to 1100 m on a vertical line array about 500 m away. After averaging over a few hours of noise records, the cross-correlation functions exhibit peaks that correspond to travel times of a direct ray between the hydrophones, as confirmed by comparison with calculations for a nominal sound speed profile, which are shown by stars in figure 2.
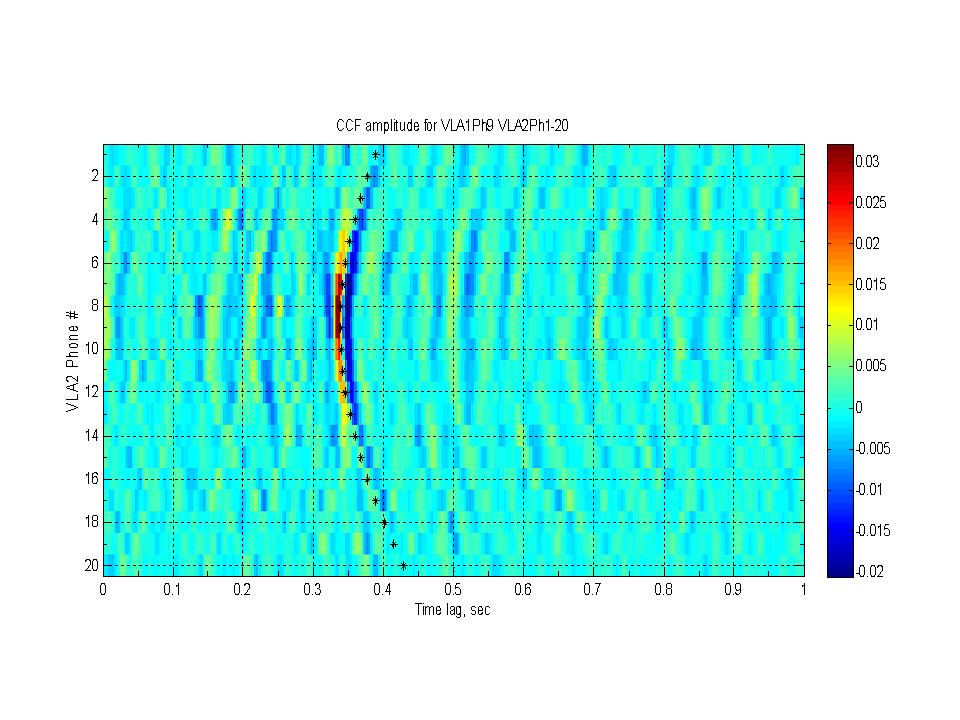
Figure 2. Cross-correlation of ambient noise recorded on different hydrophones.
The difference between the acoustic travel times measured through the noise cross-correlation and the predicted travel times is attributed to the difference between the nominal and actual sound speed profiles. The travel time differences for various hydrophone pairs have been successfully inverted to retrieve the sound speed field between pairs of vertical line arrays, up to the maximum separation of about 4 km between the line arrays that comprise the Billboard Array. In this experiment, accuracy of the inversion is found to be limited by the recording bandwidth and the noise directionality.
To our knowledge, this is the first experimental demonstration of the feasibility of ocean tomography with acoustic daylight in deep water.