![]()
![]()
![]()
Benjamin R. Dzikowicz
– benjamin.dzikowicz@nrl.navy.mil
Naval Research Laboratory
Physical Acoustics Branch
4555 Overlook Ave. S.W.
Washington, DC 20375
Brian T. Hefner – hefner@apl.washington.edu
Applied Physics Laboratory
University of Washington
1013 N.E. 40th St.
Seattle, WA 98105
Robert A. Leasko
– robert.leasko@navy.mil
Naval Surface Warfare Center
Panama City, FL 32407
Popular version of paper 2aUWb2
Presented Tuesday morning, November 16, 2010
2nd Pan-American/Iberian Meeting on Acoustics, Cancun, Mexico
With the increased use of underwater robotics in both Navy and commercial applications, underwater navigation is becoming more and more important. As we attempt to make these vehicles smaller and less expensive, simple systems for navigating multiple vehicles become important. We’ve developed and tested an underwater navigation system that uses a spiral shaped acoustic wave to determine aspect. Our single stationary beacon can provide a navigation signal for any number of underwater vehicles.
Navigation by the satellite Global Positioning System (GPS) has become ubiquitous in modern life. Many of us have GPS devices in our cars and even in our cell phones. These systems can be accurate to within a few meters. Differential GPS (DGPS), which uses a fixed antenna as a reference, can be accurate to within a centimeter. [1] Unfortunately, GPS signals cannot penetrate the water’s surface. Thus, various acoustic and inertial techniques have been developed for underwater navigation. Inertial techniques include accelerometers, like those popular in gaming consoles, and gyroscopic compasses that can determine position by judging how the vehicle is moving relative to the earth. One acoustic technique available, known as “long-baseline,” uses the distances to fixed sound sources, determined from the time it takes the sound to reach the receiver, to triangulate to the receiver’s position. [2] Another popular acoustic technique called “ultra-short baseline” navigation measures the arrival of a single incoming signal using several hydrophones (underwater microphones) positioned on the same vehicle.
Our navigation technique differs from the baseline techniques because the signal coming out of the beacon itself varies with aspect. Thus, only a single hydrophone is required. Consider the pattern of concentric circles made on the surface of a pond after a pebble is tossed in. Each of these peaks and troughs are known as wave fronts and they travel out from a central source at a fixed speed. Under the water’s surface, sound waves can easily be made to form circular wave fronts, analogous to the pebble in the pond (click here to watch a video of circular wave fronts). We’ve developed ways to produce sound with another type of wave front, a spiral wave front. Instead of concentric circles, there is one continuous spiral shaped line emanating from the source (click here to watch a video of a spiral wave front). We can stack these two sources on top of one another to make a navigational beacon. If we transmit from both sources at the same time, the signal looks like this (click here to watch a video of both wave fronts). Notice, when watching this movie, the distance between the circular and spiral wave fronts does not change along a particular direction. Thus, if I place a hydrophone at some position around the beacon, I could determine the aspect angle to the beacon by comparing the arrival of the different wave fronts. This navigation technique is also used by aircraft navigation and is called VOR (VHF Omnidirectional Range). However, VOR uses radio signals rather than sound waves. [3]
Based on this concept, Thomas Howarth at the Naval Undersea Warfare Center in Newport, RI, built a beacon for us. To test the accuracy of the beacon, we attached it to a dock on a pond about 3 meters below the water’s surface at the Naval Surface Warfare Center in Panama City, Florida. A remote controlled (RC) pontoon boat was equipped with a hydrophone below the water’s surface to determine aspect from the spiral wave front beacon and a GPS antenna above the surface to determine aspect using DGPS.
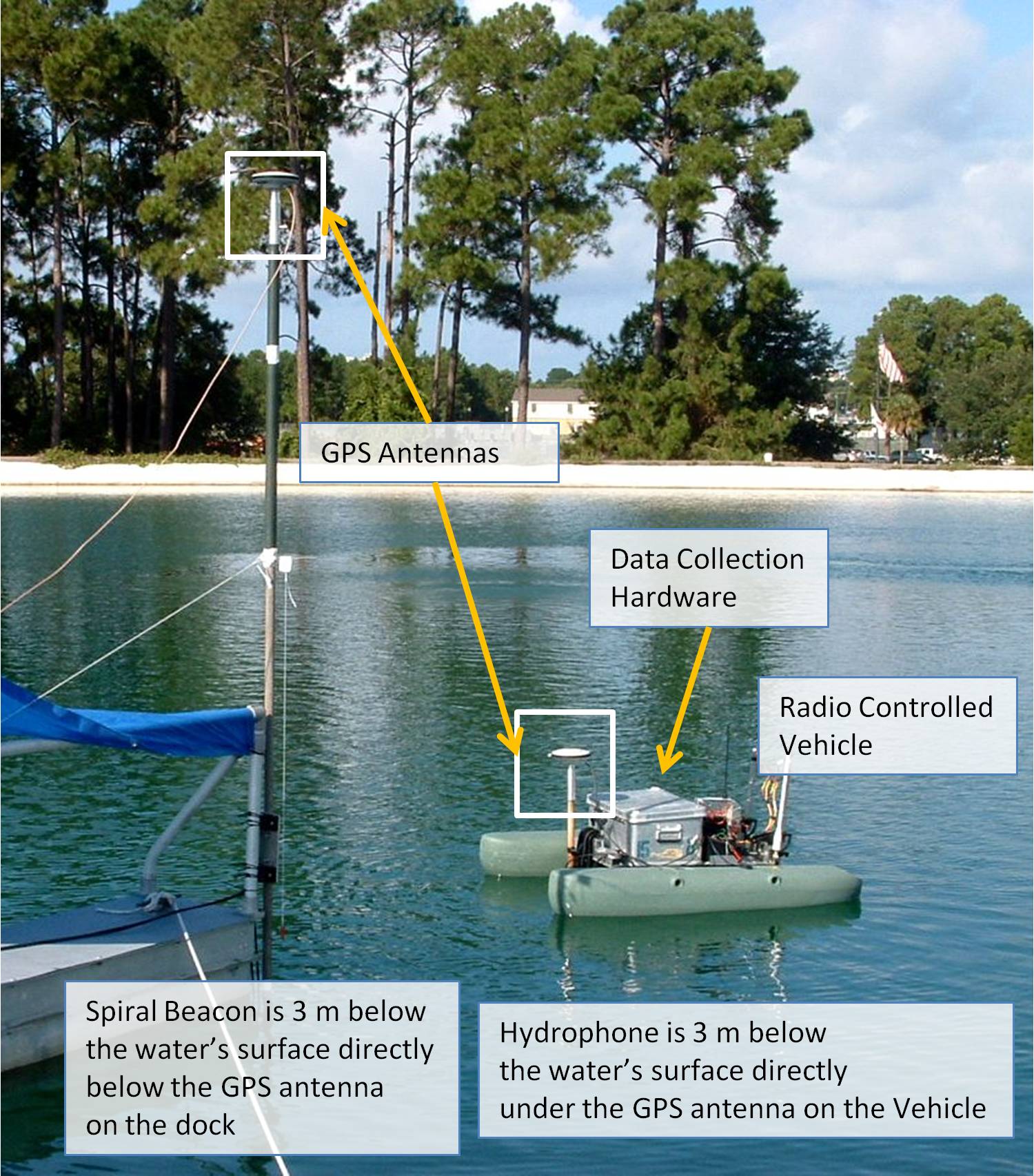
Figure 1. Photo of RC boat and dock
We then drove the RC boat around a pond and compared the aspect determination from the spiral wave front beacon to the DGPS result. Using the DGPS data we were able to put the results into a movie showing the position of the RC boat and using arrows to depict the aspect to the beacon using both the spiral wave front beacon results and the GPS results (click here to watch a navigation video). Although not as good as the DGPS results, the results were quite accurate, giving an error between 5 and 15 degrees across all of the data. We also tested several different signal processing schemes, some of which worked better in different conditions than others.
The biggest advantage of our system over more traditional baseline techniques is simplicity. A single stationary beacon can be used to navigate any number of remote underwater vehicles. The remote vehicles need only have a single hydrophone available, and can even repurpose one from its sonar or acoustic communications system. With future visions of swarms of underwater vehicles, this can be a huge advantage.