
Figure 1: A set of targets deployed during experiments in a freshwater pond. The acoustic response of each target was measured in order to generate an acoustic fingerprint.
Aubrey L. España – aespana@apl.washington.edu
Kevin L. Williams
Steven G. Kargl
Applied Physics Laboratory
University of Washington
Seattle, WA 98105
Mario Zampolli
TNO Defense Security and Safety
The Hague, Netherlands
Popular version of paper 1aUW2
Presented Monday morning, October 31, 2011
162nd ASA Meeting, San Diego, Calif.
Military training and post-war disposal sites, as well as former regions of conflict, contain bodies of water where discarded munitions can linger hidden for decades. These munitions pose an environmental issue through possible chemical contamination as well as a lethal threat to the public. Clean up of these areas, so they can be returned to public use, requires the ability to locate and discriminate man-made objects from natural objects.
Recent research shows that low-frequency sound may be exploited to help find these devices for remediation. Sound is a useful tool in the underwater environment as it travels for long distances and can even penetrate into the ocean bottom. Low-frequency sound in particular has the advantage that it can excite specific vibrations of the object, which results in the re-radiation of sound back to the observer. The scattered sound, or echo, emitted from the vibrating object and recorded at the receiver, is used to generate an acoustic template, or “acoustic fingerprint” of the object and can subsequently aid in distinguishing man-made objects from natural objects. Man-made objects, due to their shape and material composition, are especially prone to particular vibrations called structural resonances, and thus look much different acoustically than other natural objects such as rocks and shells. There are a number of key players that determine the composition of the acoustic fingerprint, the most obvious being the shape and material of the object. Almost equally important, however, is the environment the object is located in: for example whether the ocean bottom is sand or mud, or whether there are rocks or shells nearby. That is what makes this problem so difficult: the acoustic fingerprint of a specific object looks very different depending on which environment the object is located in. That is like saying that your fingerprint left on a coffee mug will look completely different than your fingerprint (from the same finger) left on the kitchen counter. Therefore, to be successful at locating and identifying potentially hazardous man-made objects, a better understanding of the relationship between the target and its environment, or more specifically its location within the environment, must be gained.
Figure 1: A set of targets deployed during experiments in a freshwater pond. The acoustic response of each target was measured in order to generate an acoustic fingerprint.
Motivated by this problem, experiments were designed and carried out in a freshwater pond (in collaboration with the Naval Surface Warfare Center in Panama City, FL). The goal was to generate acoustic fingerprints for a variety of unexploded ordnance (UXO), some of which are shown in Figure 1, in various burial states in a sandy bottom, and with a variety of clutter items nearby. An example acoustic fingerprint generated from the experiments is shown in Figure 2(a) and corresponds to an aluminum UXO copy, circled in yellow in Fig. 1, sitting on top of a sandy bottom with no objects nearby. The fingerprint paints a picture of how the target responds to sound at different frequencies, and how that response changes depending on the UXO’s orientation (the angle) with respect to the incoming sound. There are a number of bright red areas that correspond to situations in which the UXO is vibrating and thus re-radiating sound back into the environment. These are the types of features that make the fingerprint uniquely different from that of natural objects.
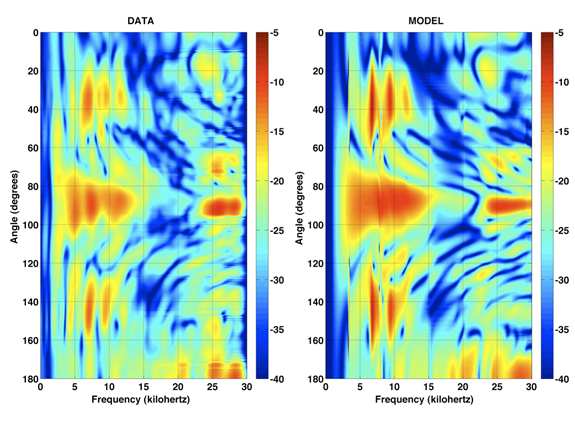
(a) (b)
Figure 2: Acoustic fingerprint of the aluminum UXO (circled in Fig. 1) sitting on a sandy bottom, generated (a) from experimental data acquired in the pond, and (b) computer model results (simulations).
Our research not only aims at generating these acoustic fingerprints for various objects, but also at understanding the physics, or the why behind what we see in the acoustic fingerprint, such as how sound couples to the object, the subsequent vibration that ensues, and finally how the sound radiates from the object back to the viewer. In this respect, our current focus has turned to computer modeling (also called simulation) techniques, which can offer insight into what happens when sound hits the object. The concept of modeling implies taking what you know about physics, and writing down the appropriate mathematical equations that represent for example, how sound propagates in the ocean, what happens when it hits an object, how the sound “latches” onto the object and bounces around inside it, and so on. Along the way, a few assumptions and approximations must be made due to the complexity of the problem, but ultimately, the full physics problem is solved with the help of only a desktop computer. Figure 2(b) illustrates the acoustic fingerprint resulting from simulating the exact target and environment of Fig. 2(a) (aluminum UXO on a sandy bottom). The data and model fingerprints agree very well, revealing that these simple models can do a very good job of predicting the acoustic response of a target in the environment. An advantage to pursuing the modeling route is that the model results allow one to examine, in detail, how the object is vibrating and how the echo will radiate away from the object. An example of this is given in Figure 3, which illustrates the vibration that the UXO experiences when it’s oriented 50 degrees relative to the incoming sound, at a frequency of 6.3 kilohertz. The red dots depict the surface of the UXO when not excited by sound, while the blue arrows indicate the direction and magnitude of the UXO surface displacement when hit by the sound. The hope is that by seeing the response of the target in this detail, it becomes clearer how to best excite these vibrations, thus yielding an improved probability of detection.
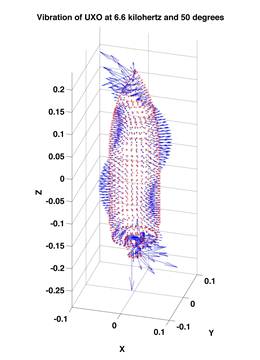
Figure 3: Vibration of the aluminum UXO, corresponding to the bright red peak in Fig. 2 at 50 degrees and 6.3 kilohertz.
The next couple of years will see a number of experiments conducted at sea aiming to generate acoustic fingerprints for many more man-made objects. Development of simulations for these objects will continue, the validity of each tested against the experimental data acquired at sea. Again, the hope is that with this knowledge we may be able to improve upon current methods for detecting and classifying objects on or embedded in the ocean bottom.
The authors would like to thank the Office of Naval Research (ONR) and the Strategic Environmental Research and Development Program (SERDP) who sponsored this work.