Efficient Warning Sounds for Quiet Vehicles (Electric and Hybrid)
Etienne Parizet – etienne.parizet@insa-lyon.fr
Ryan Robart – rrobart9@gmail.com
Laboratoire Vibrations Acoustique INSA-Lyon
Villeurbanne, France
Perceval Pondrom – pondrom@szm.tu-darmstadt.de
Wolfgang Ellermeier – ellermeier@psychologie.tu-darmstadt.de
Joseph Schlittenlacher – schlittenlacher@psychologie.tu-darmstadt.de
Technische Universität Darmstadt
Darmstadt, Germany
Karl Janssens – karl.janssens@lmsintl.com
Fabio Biancardi – fabio.bianciardi@lmsintl.com
LMS International
Leuven, Belgium
Jean-Christophe Chamard – jeanchristophe.chamard@mpsa.com
PSA Peugeot Citroën
Vélizy-Villacoublay, France
David Quinn – david.quinn@ntc-europe.co.uk
Paul Speed-Andrews – paul.speed-andrews@ntc-europe.co.uk
Nissan
Sunderland, Great-Britain
Popular version of paper 2aNSa5
Presented Tuesday morning, June 4, 2013
ICA 2013 Montreal
Electric and hybrid vehicles are very quiet at low speeds, as compared to conventional ones. Below 40 km/h, they are so quiet that they can be dangerous for pedestrians (at higher speeds, they are as noisy as conventional cars, because tire noise is dominant). This represents a major safety issue, especially for vulnerable people like visually-impaired ones. It is thus necessary to use additional sound in order to prevent pedestrian that the car is approaching. On the other hand, such quiet vehicles can greatly contribute to the reduction of noise annoyance in cities, which is another major public concern. The eVADER project, supported by the European Commission, aims at finding a compromise between improved safety and reduced annoyance for such cars. During the project, a prototype car will be developed. It will be equipped with an automatic pedestrian recognition system, a set of loudspeakers focusing sound in the direction of the pedestrian and emitting an optimized signal, which will combine a low level and a high detectability.
This paper relates experiment conducted to select this optimized signal. Nine warning sounds were synthesized. They were made by mixing different frequencies (the lowest one being 300 Hz, which roughly corresponds to a D4 note). For some of them, the frequency of some components varied in different ways, for some other ones, the amplitude of some components varied. The hypothesis was that strong variations of the signal can catch the attention of the listener.
Each sound was mixed with a recording of an electric vehicle driving at 20 km/h. The recording was made at the position of a pedestrian facing the road, as if he was waiting to cross it. The mixing was adjusted so that the warning sound increased the level of the car by a very small value (1 or 2 dB(A)). Two other sounds were added to the set of stimuli : the electric vehicles without warning sound, and the same car equipped with a diesel engine, recorded in the same situation.
All these stimuli were used in a detection experiment : during approximately 40 minutes, the subject listened to traffic noise recorded in a city during a rainy day. This noise represented some traffic far from the listener, and rain noise was used because visually-impaired people relate that it increases their difficulty in analysing their environment. At some randomly selected times, one of the stimuli was added to that noise, representing an approaching car. The task of the listener was to detect that car as soon as possible, as well as its approaching direction (left to right or vice-versa). He had to press a keyboard key (one for each direction). Each car was presented eight times, so that each participant had to do 88 trials.
The experiment was shared between different partners of the project, so that the number of participants was high (112). These participants were aged between 20 and 72, and 36 of them were visually impaired.
Averaged results can be represented as in Figure 1.
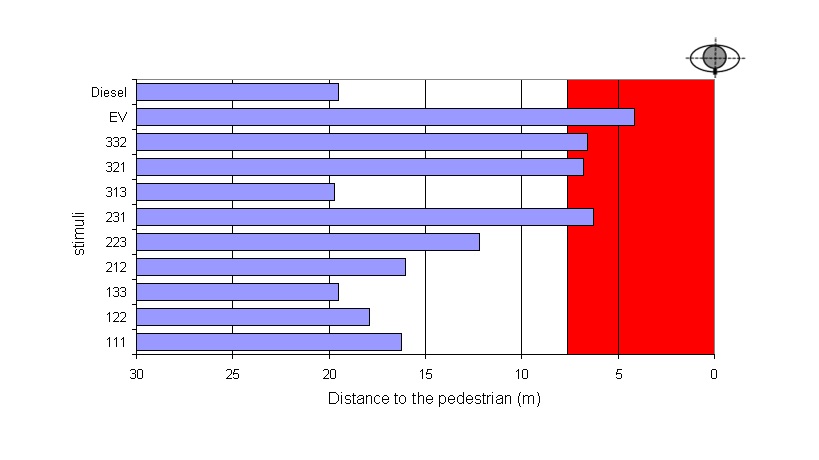
Figure 1: Averaged distance to the pedestrian when this pedestrian detects the arriving car (20 km/h). The red area represents the "dangerous area" : if the car is detected in this area only, the driver may not have time enough to brake before hitting the pedestrian.
This figure shows the average distance between the car and the pedestrian, when the pedestrian detects the car. On the top, the diesel car is detected about 20 meters before arriving in front of the pedestrian. This distance is large enough to allow the driver to stop if the pedestrian is crossing the road. The electric vehicle is detected only 4 meters before the pedestrian, in the dangerous area represented in red. If the pedestrian starts crossing the road, the driver may not have time enough to stop.
Stimuli labelled as 332, 321 and so on represent different kind of warning sound. Their efficiency are quite different. Some of them does not improve safety (332, 321 and 231), while some others make the electric vehicle as easily detected as the diesel car (313 and 133).
The number of localization errors showed the same trend: lowest values were obtained for the diesel car and the electric vehicle equipped with warning sounds which provided the best detectability (Figure 2). It should be noted that, as each vehicle was presented eight times to each of the 112 participants, the maximum number of errors is 896, so that 50 errors represent 5.5 % of this maximum possible number.
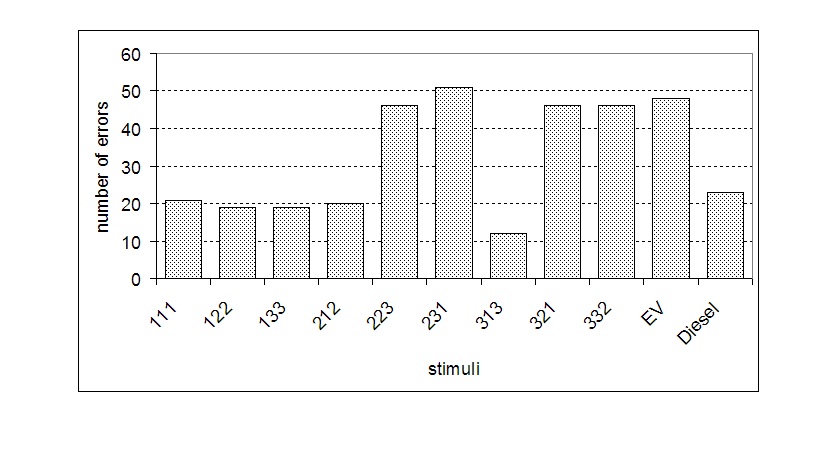
Figure 2: Number of localization errors made for each car by all participants.
This efficiency has nothing to do with the level of the warning sounds. For all of them, the maximum level of the car (as recorded as this car passed in front of the pedestrian) is much lower than the level of the diesel car (Figure 2). This shows that the detection was not based on the increase of level, but to some timbre features that caught the attention of the listeners.
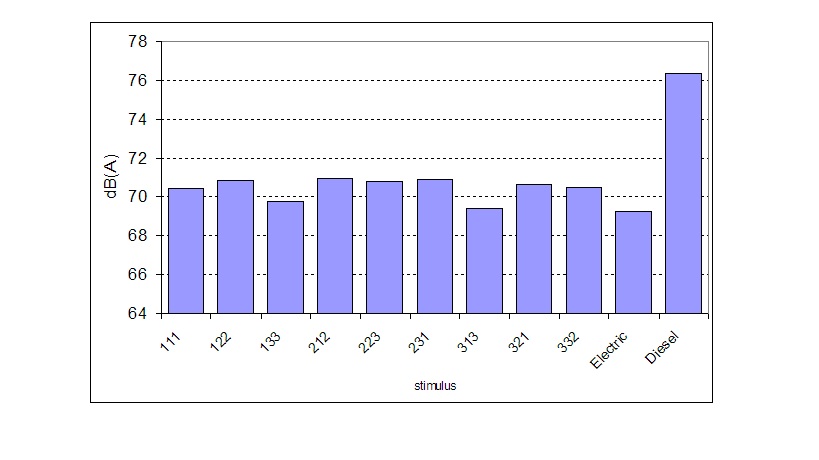
Figure 3: Maximum A-weighted sound level of each car as it passed in front of the pedestrian.
From a careful analysis of data, it seems that temporal variations of the sound are very favourable to sound detection. This is in line with previously published studies about alarms (in airplane cockpit for example). Also, it seems that focusing the signal in a narrow frequency band (300 to 900 Hz in our experiment) is beneficial. First of all, hearing ability is high in this frequency range (most hearing losses occur at higher frequencies). Secondly, focusing the energy allows to obtain a high signal-to-noise ratio in this frequency range, for a moderate overall level.
In a second experiment, we tried to evaluate whether some information about the speed and the distance of the car could be given to the listener by modifying the characteristics of the warning sound. Results showed that subjects could make the difference between car speeds, by evaluating the increase of loudness of the approaching vehicle. But no information could be transmitted by the warning sound. This indicates that car manufacturers can use different sound parameters, according to their brand image requirements, with no risk of making pedestrian make some confusion about the distance of the vehicle.