Rolf Müller rolf.mueller@yale.edu
Roman Kuc
Intelligent Sensors Lab
Department of Electrical Engineering
Yale University
15 Prospect Street
New Haven, Connecticut, 06520-8284
Popular version of paper 2pAB8
Presented Tuesday Afternoon, March 16, 1999
ASA/EAA/DAGA '99 Meeting, Berlin, Germany
Our daily experience tells us that surfaces we encounter have a characteristic structure. They could, for example, vary in roughness or display different patterns of ridges and grooves. This kind of structure ("texture") is informative in that it helps us to recognize objects in the environment.
In their nocturnal world echolocating bats may evaluate the textures of the surfaces they encounter using their biosonar: When flying in a forest bats emit an incessant train of brief, ultrasonic echolocation pulses; these sound wave-packets bounce off the leaves of the surrounding foliage. By listening to the echoes, a bat may be able to identify categories of trees. This ability helps the animal keep its way in the nightly forest: it orients itself using "landmarks" characterized by recognizable textures.
Man-made sonar is often employed as a "sensory modality" for autonomous robots. Most of these synthetic creatures inhabit office environments. However, being genuinely autonomous is not a necessary precondition for thriving in an office environment and many real-world applications for autonomous vehicles will have to cope with an outdoor setting (e.g. in agriculture or in geological surveys). Under such more natural circumstances, where bats have been flourishing for millions of years already, echolocating robots may unleash their full sensing-power. As is shown in this paper, echoes generated in a textured environment indeed harbor a wealth of information about the surrounding structures and can hence contribute valuable information to a robot's navigation.
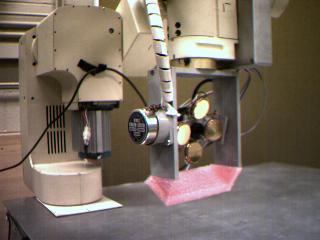 | This study used a sonar system mounted on a robot arm to obtain echoes from natural foliage representative of what a bat or its robotic cousins may encounter in the world outside the laboratory. The robot was programmed to scan along the foliage of several potted bushes, thereby collecting a total of about 1.6 Gigabytes of data (1 Gigabyte is roughly a billion bytes). The sonar pulses contained frequencies up to 120 kHz, this is about six times higher than the upper limit of the human hearing range. The returning echoes were digitized at a sampling rate of 2 MHz. The PC controlling the robot also performed the data analysis on these digital representations of the echoes. |
| A common display of sonar data is the B-scan. When collecting data for a B-scan, the sonar head moves along a straight line (forming the "cross-range" dimension) collecting data at short intervals. For each received echo, the amplitude of the incoming sound is plotted as a function of distance, which is computed using knowledge about the speed of sound. Using this technique, it was demonstrated that sonar can penetrate the foliage of some bushes astonishingly well, thereby allowing the echo properties to convey information about internal structures. The figure to the right shows this for the case of a yew-foliage, whose densely-packed needle-like leaves rendered it an unlikely candidate for any sonar penetration to occur. For generating the image, two yew branches were positioned behind each other. Despite the continuous presence of strong reflections from the first branch (marked "1st" in the figure), the second branch (marked "2nd") is clearly visible. | 
|
 | The distribution of leaves differs between plants. Some bushes have their leaves densely packed, in others they are distributed more sparsely. It was demonstrated that it is feasible to assess these differences using sonar. In order to do so, it was measured, at what time (or target range) the amplitude of the echoes first exceeded a certain threshold. For low amplitude-thresholds (blue circles in the graph on the left, which shows the results for a holly branch) a smooth contour-line results, since even weak reflections from leaves, which are located on the fringe of the volume illuminated by the sonar, are contributing. At higher thresholds (bright colors) the variability in leaf placement is revealed. |
As the sound propagates into the foliage the amplitude of the
echoes originating at different depths may or may not depend on how
deep the sound has penetrated the foliage already. The top graph in
the figure below shows an echo waveform obtained from a
ficus-tree. Obviously there is no systematic relationship between
the amplitude of the peaks and their position in the echo. In
contrast to this for echoes from the yew (lower graph in the figure below)
sound amplitude is decaying in an exponential fashion as the sonar
pulse travels into the foliage. These differences provide for a
reliable classification of these bushes, which is robust against
changes in the viewing angle of the sonar. The differences can also
be heard in slowed down versions of the echoes:
 ficus echo (Wave Audio 2kHz/16bit, stereo)
ficus echo (Wave Audio 2kHz/16bit, stereo) yew echo (Wave Audio 2kHz/16bit,stereo)
yew echo (Wave Audio 2kHz/16bit,stereo)
By analyzing a set of physically meaningful properties of echoes obtained from foliage it was possible to identify features which may be used for sonar-based classification of foliage. These insights will serve as hypotheses for investigating the function of biosonar in echolocating bats. They will also be implemented to perform landmark-based navigation in autonomous robots.