151st ASA Meeting, Providence, RI
Adaptive Mechanical Model of Human Footsteps
Alexander Ekimov - aekimov@olemiss.edu
Popular version of paper 4aSAb1
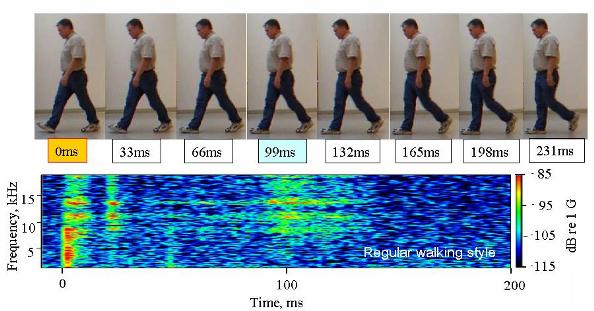
The vibration signature from footsteps can be exploited for recognizing and characterizing human intruders. From an engineering point of view, footsteps are repeatable cycles of supported surface loading by a dynamic force. This force produces the vibration response of the ground or floor starting from frequencies less than one Hz up to ultrasonic frequencies.
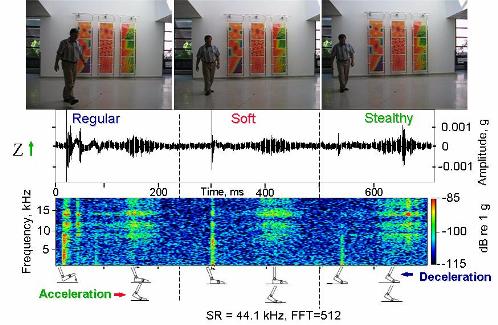
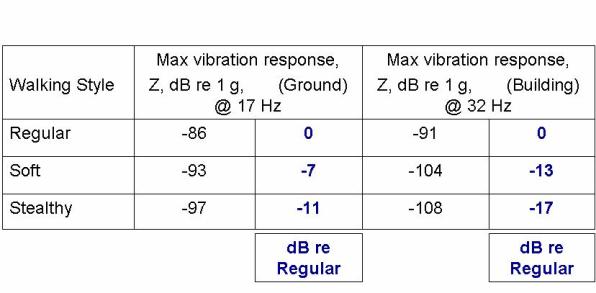
The vibration response at the distance R from the applied force is proportional to the dynamic force and results from the product of the footstep force and the ground/floor specific transfer function. The transfer function describes the propagation of vibration between the force location and the location of the detector. The vibration response of the ground/floor to the footsteps depends on the manner of walking or style as well too. Stealthy walking is undetectable at even a few meters from a seismic sensor. Walkers could vary the normal component of dynamic force of footsteps by controlling leg stiffness and as a result vary the vibration response of the ground/floor. An adaptive model of a walking person as a mass-spring system with controlled leg-spring stiffness was developed. This model explains the algorithm of walking stealthy. Three distinct types of walking styles (regular, soft, and stealthy) with the same speed of motion were described and investigated.
These styles result in different vibration magnitudes in the low-frequency range (below 100 Hz) due to differences in the walkers leg stiffness and as a result in variation of distances for the footstep vibration response detection.
|